Point clouds
-

Thanks to RS for raising this issue via a blog comment and to my esteemed colleague, Christer Janson, for suggesting the solution during England's epic Euro 2012 victory over Sweden on Friday evening (sorry, Christer – I couldn't help but rub it in just a little ;-). On a slightly more serious note, I find it very painful to watch England play, at the best of times, and while I was happy "we" won, I was sad to see Sweden left with no chance of continuing past the group stage. So it goes. Those of you who have played around…
-

You're probably thinking I've been talking about little else other than making Kinect work with your PC, of late (and not only because I've had a class to prepare for AU, I also think this technology has the potential to be very significant), but I did feel it was worth pointing out this important announcement from Microsoft: early next year (which presumably now means weeks away) we'll see a version of Kinect that's specifically intended to work with Windows systems (rather than the current version of the device that's really intended to be a controller for the Xbox 360). What's…
-
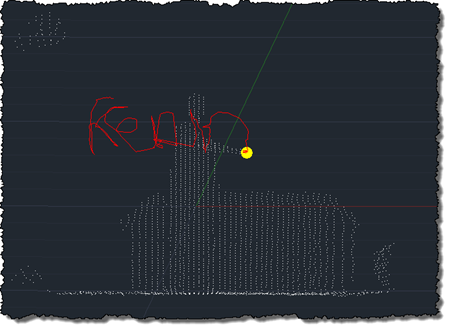
After using the Microsoft Kinect SDK to bring point clouds into AutoCAD and then to track skeleton information, I'm happy to report that I now have an equivalent implementation of this previous post, where we used OpenNI and NITE to understand gestures captured by the Kinect and draw 3D polylines inside AutoCAD. This implementation is a bit different from the last, mainly in that – given the additional calculation needed to map points into "skeleton space" when building out point cloud – I no longer transform all the points and then select a sampling. This implementation passes a sampling value…
-
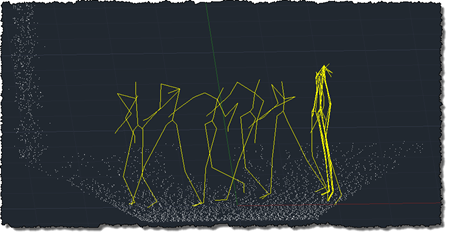
To follow on from my post showing how to get point cloud information from Kinect into AutoCAD – using Microsoft's official SDK – this post looks at getting skeleton information inside AutoCAD. The code in today's post extends the last – although I won't go ahead and denote the specific lines that have changed – by registering an additional callback called by the Microsoft runtime which, in turn, stores data in memory to be displayed when the jig's WorldDraw() is next called inside AutoCAD. The main thing to note is what's needed to map the skeleton information into AutoCAD's world…
-
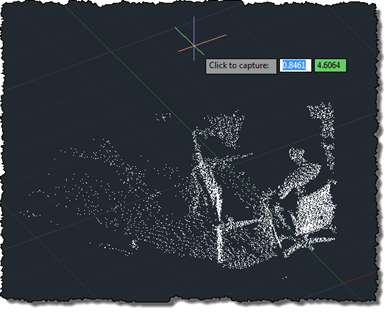
As mentioned, last week, I've been working away to port my previous OpenNI/NITE AutoCAD-Kinect integration across to the official (although still in Beta) Microsoft Kinect SDK. Today's post presents a very basic implementation – essentially equivalent to the code in this previous post – which makes use of the Microsoft Kinect SDK to bring a colourised point cloud into AutoCAD. As in the previous post, the txt2las tool is still currently needed to bring the generated point cloud into AutoCAD. It's worth noting that the Microsoft SDK is a) much simpler to install/deploy and b) provides more reliable colourisation of…
-
Actually, I wish that were true. I'm planning on taking some time off in October, but that seems a long way off, at this stage. What I've actually been doing is working with some REST-based APIs: firstly, I've been finishing up work on September's Plugin of the Month, TransTips for AutoCAD, Revit, Inventor, & 3ds Max (to be posted on Autodesk Labs in the next few days). TransTips makes use of the REST API for Bing Translator, to automatically translate tooltips in various products. Secondly, perhaps more excitingly, I've been coding against a possible future web service API for Project Photofly.…
-
I've been planning to look at it for ages – and have certainly mentioned it before – but other things have kept on cropping up. Well last Thursday, on my train trip back from Wallisellen (the home of Microsoft Switzerland), I finally managed to take the plunge and start working with the Async CTP for Visual Studio 2010. I'd been in Wallisellen to attend an MSDN TechTalk presentation by Stephen Toub, Principal Architect on Microsoft's Parallel Computing Platform team. I've followed Stephen via his blog – and the Parallel Programming with .NET blog – for a long time, and thought…
-

I've been really excited about this release, ever since I saw the technology in action at last year's AU. The first release of the technology was interesting, but this version really takes things to a new level: you can generate a fully textured mesh from a set of photographs. A lot of work has clearly been done on the technology to address scalability issues: I have a set of close to 500 images of a local monument, which previously was not handled by the Photofly service (for which the Photo Scene Editor is the main client application). Now, though, the…
-
After focusing on a manual process for sweeping a solid inside AutoCAD in this previous post, it seemed to make sense to attempt to automate more of that process. In the code in this post, we take a standard circular profile – of a user-specified radius – and sweep it along the path defined by the user's hand movements. Back in the original Kinect integration example we created a 3D polyline path linking every position of the user's hand detected by Kinect. This makes a very jittery path for our purposes, so we're going to define a spline along fit…
-
In this previous post we looked at some code to capture and combine a series of point clouds using a Kinect sensor. In today's post we're going to take a very slightly modified version of the code – which really only adds the feature to let the user choose when the sequence of captures should start by clicking, rather than it just starting at the beginning of the command – to capture the geometry created by dragging a 2D cross-section in 3D space. The code in the last post clearly played a big part in helping digitise the profile and…